La domanda riguarda un ambito tecnico estremamente vasto, cercherò quindi di fornire le maggiori informazioni possibili per dare un quadro completo del panorama tecnologico, senza scendere troppo nel dettaglio delle singole soluzioni.
Il movimento delle superfici di controllo di un velivolo (tra le quali si annoverano anche gli alettoni) è ottenuto con modalità molto diverse a seconda della classe dell’aeromobile considerato. Un piccolo velivolo dell’aviazione leggera (ad esempio un Piper PA-28 Archer o un Cessna 172) ed un aereo militare dell’ultima generazione (ad esempio un Eurofighter Typhoon o un F22 Raptor) sono controllati in base agli stessi principi aerodinamici, ma il modo di ottenere la voluta distribuzione di pressioni che genera forze e momenti attraverso il movimento delle superfici di controllo, è implementato con tecnologie completamente differenti.
Un breve richiamo sui concetti basilari del controllo di aeromobili ad ala fissa.
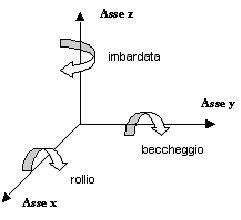
Attraverso un opportuno cambiamento della distribuzione di pressione sulle ali e sugli impennaggi, le superfici di controllo generano dei momenti che consentono al velivolo di ruotare intorno ai tre assi principali, come indicato nelle figure riportate sopra. In particolare gli alettoni consentono la rotazione attorno all’asse longitudinale (rollio – controllo laterale), il timone consente la rotazione attorno all’asse verticale (imbardata – controllo direzionale) e l’equilibratore di coda consente la rotazione attorno all’asse trasversale (beccheggio – controllo longitudinale). Generalmente agendo sulla cloche si movimentano gli alettoni e l’equilibratore di coda ottenendo rollio e beccheggio, mentre il controllo del timone è affidato alla pedaliera. L’utilizzo delle superfici di controllo da parte del pilota è normalmente combinato, per virare ad esempio, si agisce sia sulla cloche, controllando rollio e beccheggio, che sulla pedaliera, controllando la direzione.
I sistemi di comando che consentono di associare ai movimenti della barra le rotazioni delle superfici, come detto, possono essere di molti tipi diversi, con grado di complessità e costi crescenti.
I sistemi più semplici sono quelli di tipo meccanico, utilizzati sui primi aeroplani costruiti ed ancora oggi su quelli dell’aviazione leggera, dove le forze aerodinamiche in gioco non sono eccessive. Si tratta sostanzialmente di circuiti cinematici fatte di aste, cavi, pulegge e talvolta anche catene che trasmettono i movimenti imposti alla cloche fino alle superfici di controllo, causandone una rotazione proporzionale. Il pilota sente direttamente sulla cloche l’intensità delle forze aerodinamiche che si oppongo alla rotazione delle superfici e ad esse deve contrapporsi con la forza del proprio braccio. All’aumentare delle dimensioni e della velocità del velivolo, l’intensità delle forze cui contrapporsi assume valori troppo elevati per poter essere gestita direttamente, si rende quindi necessaria l’introduzione di complicati sistemi meccanici e aerodinamici di assistenza che rendano sopportabili per il pilota i cosiddetti “sforzi di barra” (ad esempio sistemi di bilanciamento inerziale delle superfici mobili). La complessità e il peso di tali sistemi aumenta però rapidamente con le dimensioni/prestazioni del velivolo, quindi oltre un certo limite risulta conveniente passare a sistemi basati sull’utilizzo della potenza idraulica, il cui impiego è generalmente delimitato da fattori di carattere economico più che da limiti sulle forze in gioco.
I sistemi di controllo di tipo idromeccanico possono essere suddivisi in due parti: il circuito meccanico e il circuito idraulico. Il circuito meccanico, composto come sempre di aste, cavi, pulegge ed eventualmente catene collega la cloche al circuito idraulico, composto invece di pompe, tubi, valvole ed attuatori. Gli attuatori, che sono comandati per mezzo della pressione idraulica immessa nel circuito dalle pompe collegate ai motori, sfruttando la pressione muovono le superfici di controllo. Le escursioni degli attuatori sono controllate da servo valvole, la cui apertura/chiusura è legata direttamente ai movimenti della cloche attraverso il circuito meccanico. Le forze aerodinamiche che si oppongono alla rotazione delle superfici di controllo non sono più trasmesse direttamente al pilota sulla barra ma sono “sentite” solo dagli attuatori. Per dare quindi al pilota le corrette sensazioni sulle condizioni di volo vengono introdotti dei sistemi artificiali che simulano gli sforzi di barra che si avrebbero con un sistema puramente meccanico, aumentando la resistenza ai movimenti della cloche all’aumentare della velocità del velivolo e viceversa.
Anche per i sistemi idromeccanici complessità, costi e peso sono aumentati nel tempo, causando lo sviluppo dei cosiddetti sistemi fly-by-wire, che rispetto ai precedenti presentano grandi vantaggi. Si tratta di sistemi in cui sia il circuito meccanico che quello idraulico possono essere sostituiti da un circuito elettrico, ne esistono quindi di vari tipi classificati in base alla “percentuale” di utilizzo della componente “elettrica”.
In generale i movimenti della cloche sono convertiti in segnali elettrici da appositi trasduttori. Nei sistemi fly-by-wire analogici tali segnali vengono trasmessi direttamente a servovalvole ad azionamento elettrico che comandano gli attuatori, mentre nei sistemi fly-by-wire digitali i segnali dei trasduttori vengono processati da un’unità elettronica dedicata che si occupa dell’azionamento delle servo valvole. Generalmente la potenza idraulica generata dalle pompe viene distribuita da un sistema di tubi che la trasporta fino ai singoli attuatori installati nei pressi delle superfici da movimentare. Esistono anche sistemi in cui la potenza idraulica viene generata localmente, presso i singoli attuatori che incorporano anche una pompa, si ha quindi un sistema di generazione della potenza non più centralizzato ma distribuito.
Nei sistemi digitali la grandissima rivoluzione consiste nell’introduzione di una sorta di “filtro” tra il pilota e le superfici di controllo, rappresentato dal computer del sistema di controllo del volo. Il computer gestisce il movimento delle superfici in accordo alle leggi di controllo caricate nel suo software e agli input che gli arrivano dalla cloche, cioè al movimento della cloche corrisponde un azionamento delle servovalvole deciso dalle regole implementate nel software del “flight control system”. Viene meno l’autorità completa del pilota sul velivolo, poiché le sue azioni sono ora subordinate a quanto concesso dal computer (sistemi carefree).
Il primo aereo di linea del tipo fly-by-wire fu il Concorde, si tratta quindi di una tecnologia piuttosto matura.
In alcuni aeromobili di ultimissima generazione i sistemi fly-by-wire classici si sono evoluti nei cosiddetti sistemi full electric o power-by-wire, in cui anche la parte idraulica è completamente sostituita da quella elettrica (tra i velivoli militari esiste ad esempio un prototipo di F16 full electric). I principi sono gli stessi ma gli attuatori che muovono le superfici di controllo sono azionati da motori elettrici, non più idraulici, con notevole riduzione del peso del sistema (quantomeno per i velivoli civili a basse prestazioni). Esistono anche versioni dei sistemi fly-by-wire denominate fly-by-optics, in cui i segnali sono trasmessi su fibra ottica per aumentarne la velocità e quindi migliorare la risposta del velivolo alle sollecitazioni del pilota.
L’uso dei sistemi fly-by-wire digitali ha consentito di estendere l’impiego dei velivoli militari oltre il normale campo di stabilità aerodinamica delle macchine, aumentando in modo incredibile la loro manovrabilità. A differenza del pilota, infatti, il computer è in grado di gestire situazioni intrinsecamente instabili comandando contemporaneamente e a velocità elevatissime le varie superfici di controllo per compensare situazioni altrimenti ingestibili (l’F-117 e il B2 rappresentano l’esempio più classico, dove una configurazione instabile come l’ala volante è invece utilizzata con notevole efficacia).
L’estrema frontiera nel campo dei sistemi di controllo è rappresentata dai cosiddetti sistemi IFCS (Intelligent Flight Control System) nei quali il computer non governa solo le superfici di controllo, sulla base degli input che gli arrivano dalla cloche, ma può controllare anche la spinta dei motori e vari apparati avionici che gli consentono di rimediare a situazioni di potenziale pericolo derivanti da guasti di varia natura.